.png&blockId=20d18d5c-31e3-80f7-a433-cf95527225b9)
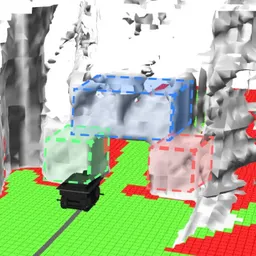
Baseline mapping (b) incorrectly labels obstacle voxels as free space due to odometry drift. Our certified map (c) deflates the reported safe region so that safety is preserved at every frame.
Accurate state estimation and mapping are prerequisites for safe navigation, yet most pipelines assume perfect pose estimates. Incremental drift in vision-based odometry (VIO/SLAM) can cause a map to misclassify obstacles as free space, leading to collisions.
We introduce a certifiably-correct mapping framework that deflates the claimed safe region at each timestep using the covariance of the incremental pose estimate. The deflation guarantees that the map stored in the robot’s body frame remains a subset of the true free space, even while global pose error grows unbounded.
Key points
•
Provably safe: the shrunken set is always a subset of the true free space.
•
Two plugins:
1.
Certified-SFC: deflates each face of a Safe Flight Corridor (SFC) polytope.
2.
Certified-ESDF: subtracts a voxel-wise safety margin from an ESDF.


How It Works
Certified-SFC
Certified-ESDF
At every frame we take the odometry pose and its covariance, project that uncertainty onto the current map, and shrink the reported safe region so it remains a subset of the true free space.
•
Certified-SFC – In SFCs (convex polytopes), each face is moved inward by a covariance-based margin, keeping the corridor entirely safe.
•
Certified-ESDF – In ESDFs we subtract a voxel-wise safety radius, ensuring the distance map never over-estimates clearance.
Both applications run in real time on an onboard computer (Nvidia Jetson Orin NX).
Preview Experiments
Simulation Results

On the Replica dataset, the certified maps remove all safety violations.
•
Baseline SFCs violate free-space constraints in 19 % of samples with penetrations up to 100 mm, while Certified-SFC shows nearly zero violations ( ~ 0.0002 %).
•
Certified-ESDF achieves the same guarantee, reducing violation rates from 48 % to 0.5 % (in office0).
Hardware Experiments

Experiments: A ground rover reverses through a narrow tunnel mapped earlier.
A ground rover carries an Intel RealSense D455 RGB-D camera and runs all perception, mapping, planning, and control on an NVIDIA Jetson Orin NX. Nvidia VSLAM provides odometry, our modified NvBlox library builds ESDFs at 30 Hz.
The teleoperator first mapped a narrow tunnel, then reversed the rover through it while relying solely on the stored map.

•
Baseline: The rover collided with the rear wall due to odometry drift.
.gif&blockId=20d18d5c-31e3-80c4-b7ff-d1ecb7ab7e58)
•
Certified-ESDF: Map deflation turned uncertain voxels from green (safe) to red (unsafe). When the rover reached this boundary the safety filter stopped the rover before collision. The same outcome was observed across the additional trials shown in the supplementary video.
Acknowledgement
This work has been supported by the National Science Foundation (NSF) under grant no. 1942907.
BibTex
@inproceedings{agrawal2025certifiably,
author = {Agrawal, Devansh R and Kim, Taekyung and Govindjee, Rajiv and Adeshara, Trushant and Yu, Jiangbo and Ravikumar, Anurekha and Panagou, Dimitra},
title = {Certifiably-Correct Mapping for Safe Navigation Despite Odometry Drift},
booktitle = {Robotics: Science and Systems (RSS)},
shorttitle = {Certifiably-Correct Mapping},
year = {2025}
}
LaTeX
복사