Can we bring parallelization into safety filters?
We present Policy Library Control Barrier Function (PL-CBF), a runtime safety filter for autonomous systems operating under evolving constraints and parameter-dependent dynamics. Unlike single-fallback safety filters, PL-CBF retains a finite library of candidate closed-loop policies and certifies safety whenever at least one library policy remains safe over the planning horizon. The method certifies safety on the fly; no offline value function computation. We validate PL-CBF on a planar double-integrator, highway driving with abrupt friction changes (8 states), and 3D quadrotor navigation in crowded dynamic environments (12 states), showing improved safety over single-policy safety filters while retaining millisecond-level runtime.


Motivation
Safety filters that rely on a single pre-defined backup or fallback maneuver are brittle in unstructured environments. For example, a stop maneuver can fail under sudden friction drop, and a fixed evasive maneuver can become infeasible when newly detected obstacles invalidate that behavior. As a result, single-fallback methods can become overly conservative or fail even when another safe maneuver exists. PL-CBF addresses this issue by retaining multiple fallback behaviors through a finite policy library and evaluating them online at runtime.
Preview Experiments
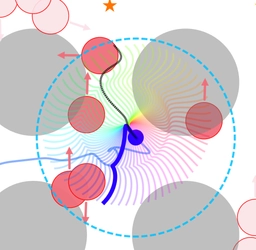
1. Safe Set Under Multiple Fallback Policies
•
Double integrator (4 states, 2 inputs), with input constraint [-0.5, 0.5] m/s²
•
Fallback policy: Move up, move down, stop
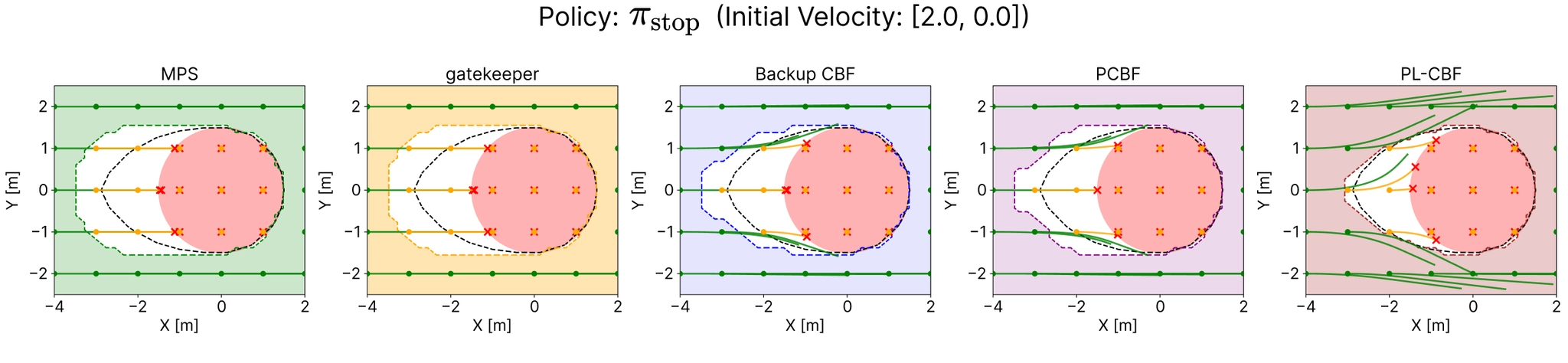
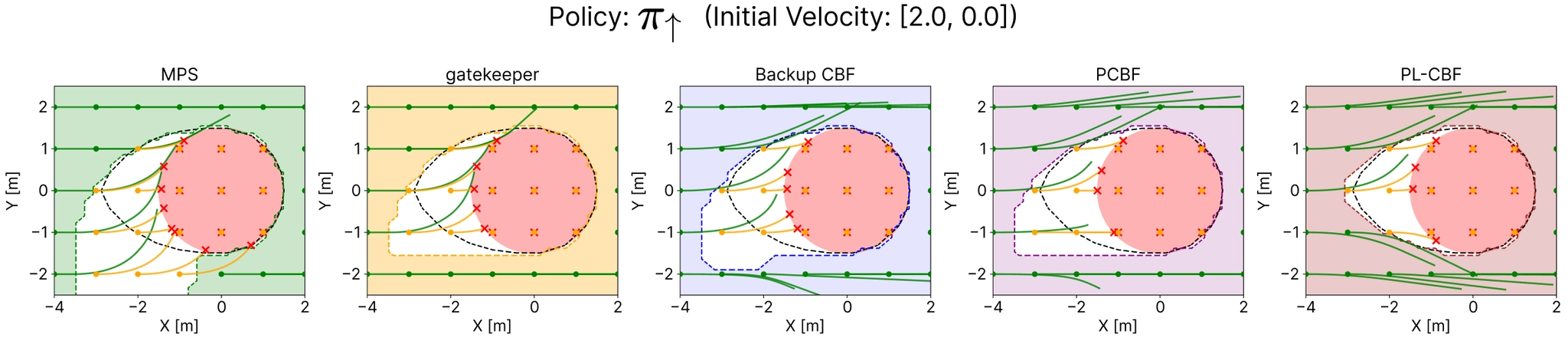
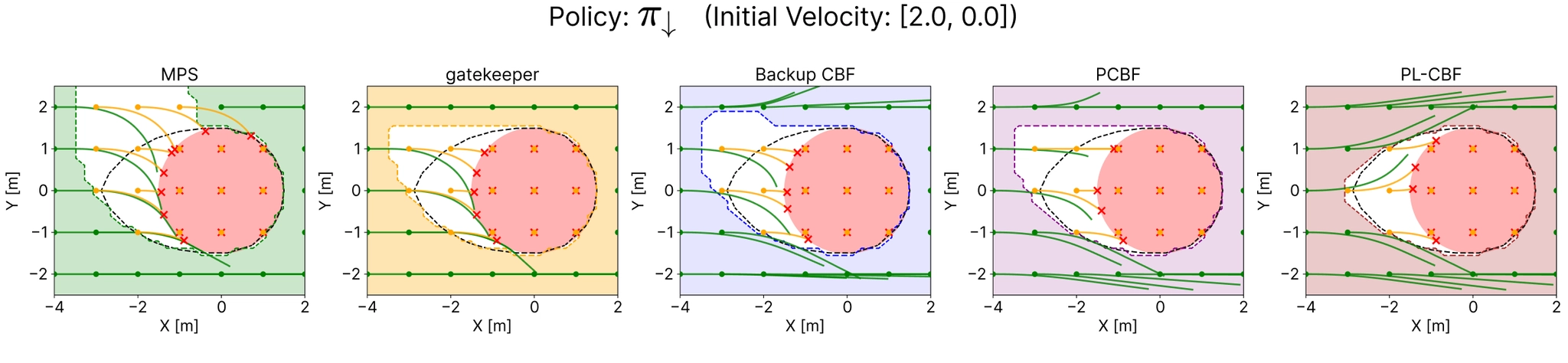
This example shows clearly that single-policy safety filters recover different safe sets depending on the chosen fallback maneuver. PL-CBF removes this tradeoff by certifying safety whenever any maneuver in the library remains feasible over the horizon.
2. Highway Driving with Sudden Friction Change (8 states, 2 inputs)
•
Nominal policy: Model Predictive Contouring Controller (MPCC)
•
Fallback policy: Left lane change, right lane change, stop
Compared baselines
(Ours) PL-CBF
.png&blockId=31918d5c-31e3-8044-95c6-f50a92da4d40)
3. 3D Quadrotor Navigation in Crowded Environments (12 states, 4 inputs)
•
Sensing range is limited
•
Nominal policy: Navigate to waypoints sequentially
•
Fallback policy (compared baselines): Retrace to previous waypoint
•
Fallback policy library (PL-CBF): 64 evasive maneuvers + 1 nominal
Compared baselines
(Ours) PL-CBF
More Test Cases: PL-CBF
1/100 trial
Closer look: 1/100 trial
2/100 trial
3/100 trial
Acknowledgement
This work has been supported by Toyota Research Institute of North America (TRINA), Toyota Motor North America.
BibTex
@inproceedings{kim2026plcbf,
author = {Kim, Taekyung and Okamoto, Hideki and Hoxha, Bardh and Fainekos, Georgios and Panagou, Dimitra},
title = {Policy Library CBF: Finite-Horizon Safety at Runtime via Parallel Rollouts},
booktitle = {arXiv},
shorttitle = {PLCBF},
year = {2026}
}
LaTeX
복사