VTOL quadplane
3D quadrotor in top-down view
.png&blockId=36518d5c-31e3-809b-9d46-ec8fbb3290a9)
Overview of OA-CBF. Offline, rollout data are used to train a probabilistic ensemble neural network that takes candidate CBF parameters as inputs and uses a graph-attention-based encoder to represent the robot, goal, and obstacle environment. During deployment, candidate CBF parameters are sampled, verified under epistemic and aleatoric uncertainty, and then selected according to predicted task progress before updating the CBF-based controller.
Control Barrier Functions provide a powerful way to enforce safety constraints in robotic systems, but their behavior depends strongly on the chosen class-K parameters. Under input constraints, these parameters are not merely performance tuning knobs: conservative choices can preserve feasibility but slow the robot down, while aggressive choices can make the safety filter infeasible or unsafe.
This work proposes Online Adaptive CBF (OA-CBF), a framework that adapts CBF parameters at runtime. Instead of directly predicting a single “best” parameter, OA-CBF evaluates queried candidate parameters. The method verifies whether each candidate is locally valid over a finite prediction horizon, rejects unreliable predictions using epistemic and aleatoric uncertainty estimates, and then applies the verified candidate with the best predicted progress.


Motivation
A conservative CBF parameter can keep the controller feasible but may cause slow or circuitous behavior.
An aggressive parameter can improve nominal progress but may become infeasible near obstacles under input constraints.
A single fixed CBF parameter is rarely ideal across all states and environments. Far from obstacles, aggressive parameters may allow faster progress. Near obstacles, however, the same parameters can shrink the feasible input set and cause infeasibility. Conversely, conservative parameters often maintain feasibility but may activate safety constraints too early, producing slow or overly cautious motion.
This motivates an online adaptation mechanism that can change the CBF parameter as the robot moves, while still rejecting unsafe or unreliable updates before they are applied to the controller.
Core Idea: Local Validation Instead of Global Tuning
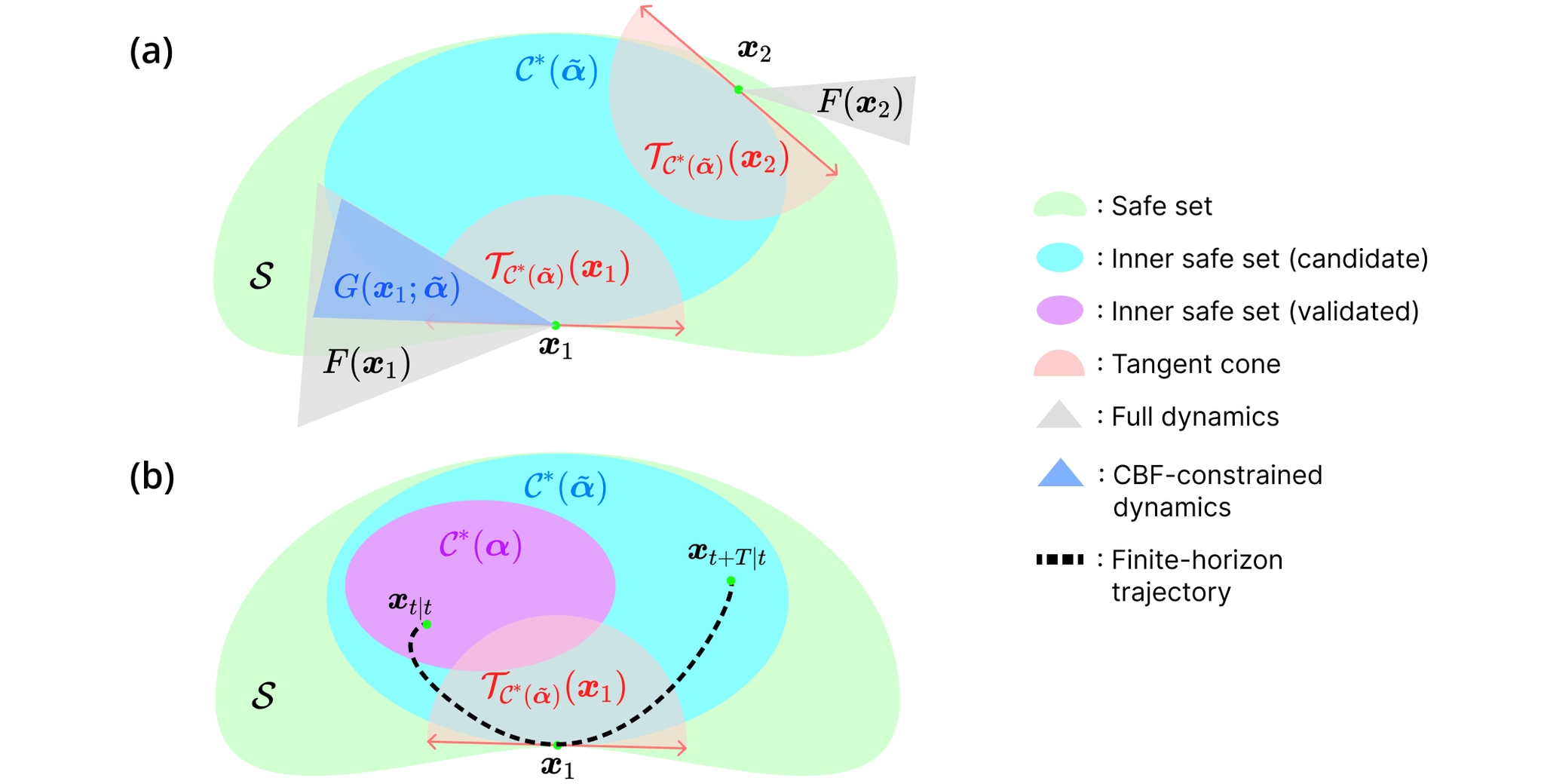
Rather than requiring one globally valid CBF parameter for all future states, OA-CBF validates candidate parameters over a finite horizon around the current operating condition.
The key theoretical object in OA-CBF is the locally validated CBF parameter. Instead of searching for a single parameter that is globally valid for all possible future states, OA-CBF verifies candidate parameters over a finite prediction interval.
At each update time, the controller applies a parameter only for an interval covered by the finite-horizon validation. The next update repeats the same procedure with a newly validated parameter. This receding-horizon view allows the inner safe set induced by the CBF parameter to be reshaped online, reducing conservatism while maintaining an explicit validation step before each update.
Method: Query Candidate CBF Parameters, Then Verify Them
A. Overview
.png&blockId=36518d5c-31e3-802d-8d65-f00e043fb346)
OA-CBF does not directly output a single adapted parameter (see (a)). It evaluates queried candidate parameters and predicts safety-risk and performance metrics for each candidate (see (b) and (c)).
A direct learning approach would train a neural network to output one adapted CBF parameter from the current state and environment. In safety-critical control, this is risky: an overconfident prediction under out-of-distribution conditions directly changes the feasible-control set of the safety filter.
OA-CBF instead uses the learned model as an evaluator. At runtime, candidate CBF parameters are sampled around the previously applied parameter. Each candidate is passed through a probabilistic ensemble model, which predicts a safety-risk metric and a progress metric. The candidate is accepted only if it passes both uncertainty filters. Among the accepted candidates, OA-CBF selects the one with the best predicted task progress.
B. Uncertainty-Aware Parameter Verification
.png&blockId=36518d5c-31e3-8062-94e5-d957b9c76664)
OA-CBF separates uncertainty into epistemic uncertainty, which detects unreliable model predictions, and aleatoric uncertainty, which screens the predicted safety-risk tail.
.png&blockId=36518d5c-31e3-8032-ac88-e4a28a7784d3)
Distributionally Robust CVaR
The verification step has two uncertainty gates.
First, OA-CBF measures epistemic uncertainty through ensemble disagreement. The threshold is calibrated using conformal prediction, so candidates with unreliable or out-of-distribution predictions are rejected before they affect the controller.
Second, OA-CBF screens aleatoric uncertainty using a distributionally robust CVaR condition. This evaluates the right tail of the predicted safety-risk distribution and accepts a candidate only when the worst ensemble member predicts sufficiently low tail risk.
Only after these two gates does OA-CBF use the predicted progress metric to choose the parameter to apply.
C. Graph Attention Encoding
.png&blockId=36518d5c-31e3-8078-8a61-dae679c7c188)
The graph encoder represents the robot, goal, and all observed obstacles without padding, truncation, or closest-obstacle selection.
In obstacle-rich environments, the number of observed obstacles changes over time. Instead of selecting only the closest obstacles or padding the input to a fixed size, OA-CBF represents the scene as a graph containing the robot, the goal, and all observed obstacles. The graph-attention encoder aggregates the obstacle information into a fixed-dimensional context vector, while keeping the queried CBF parameter explicit in the model input.
D. What Does the Model Learn?
.png&blockId=36618d5c-31e3-8000-a973-e6782cabf1e6)
Safety-loss density used to construct the safety-risk label. The loss increases near obstacles and emphasizes directionally relevant approach configurations.
.png&blockId=36618d5c-31e3-80dd-aee6-cfce81ff2b0e)
Learned risk predictor. The predicted risk increases for smaller obstacle distances, larger speeds, and headings more directly aligned with the obstacle.
The model predicts two quantities for each queried CBF parameter: a safety-risk metric and a progress metric. The safety-risk label is constructed to preserve the CBF certificate implication while emphasizing nearby and directionally relevant obstacles. The progress metric measures how effectively the robot moves toward the goal over the prediction horizon.
During deployment, OA-CBF does not rely on the ensemble mean alone. The full predictive distribution is used for epistemic gating and CVaR-based aleatoric screening.
Results
A. Dynamic Unicycle
Dynamic Unicycle: Unified view with compared methods
Dynamic Unicycle: OA-CBF w/ GAT
B. Quad2D
Quad2D: Unified view with compared methods
Quad2D: OA-CBF w/ GAT
C. Quad3D
Quad3D: Unified view with compared methods
Quad3D: OA-CBF w/ GAT
D. VTOL Quadplane
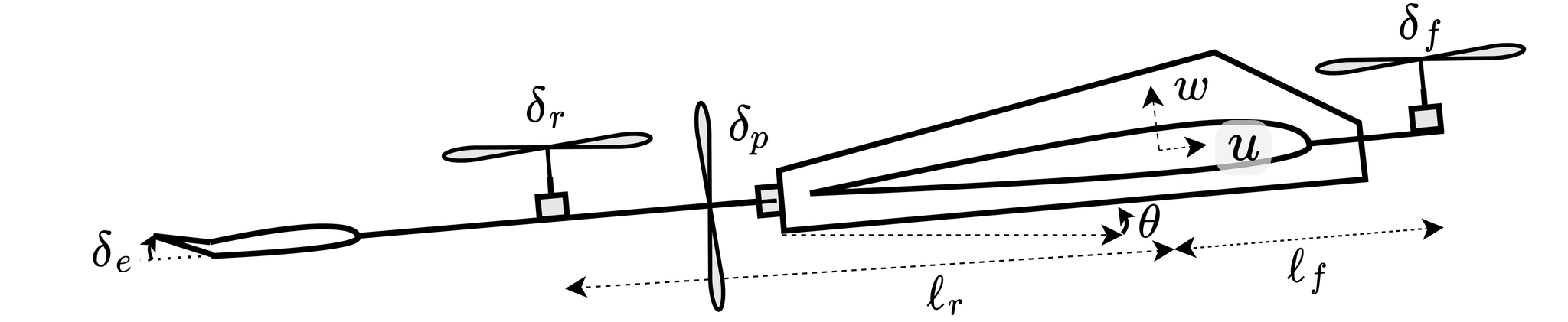
Illustration of a VTOL quadplane aircraft
We apply our method to a VTOL quadplane transition and landing scenario, where it is the first application of CBFs to VTOL quadplane control tasks.
Fixed low CBF parameters - a significant altitude detour
Fixed high CBF parameters - become infeasible, eventually collide
The videos demonstrate simulation results comparing two baseline methods.
VTOL Quadplane: OA-CBF
A closer look. (right) Evolution of the adapted CBF parameters over time.
Our method dynamically adjusts the CBF parameters based on the aircraft’s speed and position. Initially, due to the high speed, it maintains low CBF parameters, prompting the elevator to pitch up and generate additional drag. As the aircraft slows down, the parameters increase to enhance performance.
E. Kinematic Bicycle with DPCBF
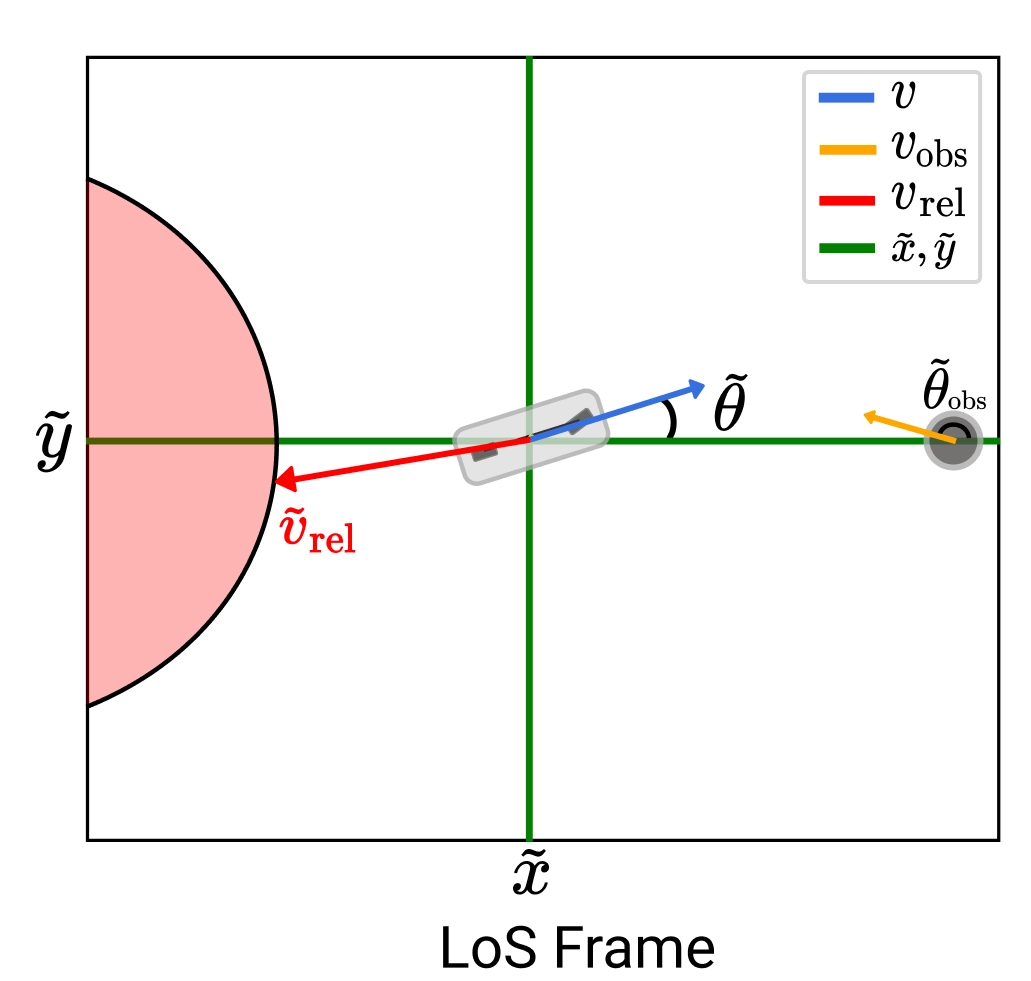
Parabolic safety boundary is defined on the Line-of-Sight (LoS) coordinate frame
Illustration of DPCBF’s safety boundary
DPCBF (  [ICRA 2026] Dynamic Parabolic CBF) is a CBF formulation for dynamic obstacle avoidance with nonholonomic robots. In this formulation, the robot is considered safe as long as its relative velocity vector remains outside the parabolic unsafe region. We use this benchmark to show that OA-CBF is not limited to distance-based CBFs, but can also adapt CBF parameters for relative-velocity-based safety conditions.
[ICRA 2026] Dynamic Parabolic CBF) is a CBF formulation for dynamic obstacle avoidance with nonholonomic robots. In this formulation, the robot is considered safe as long as its relative velocity vector remains outside the parabolic unsafe region. We use this benchmark to show that OA-CBF is not limited to distance-based CBFs, but can also adapt CBF parameters for relative-velocity-based safety conditions.
[ICRA 2026] Dynamic Parabolic CBF) is a CBF formulation for dynamic obstacle avoidance with nonholonomic robots. In this formulation, the robot is considered safe as long as its relative velocity vector remains outside the parabolic unsafe region. We use this benchmark to show that OA-CBF is not limited to distance-based CBFs, but can also adapt CBF parameters for relative-velocity-based safety conditions.Kinematic Bicycle with DPCBF: Unified view with compared methods
Kinematic Bicycle with DPCBF: OA-CBF w/ GAT
With the Dynamic Parabolic CBF, OA-CBF adapts a non-distance-based safety condition in dynamic-obstacle environments.
BibTex
@inproceedings{kim2026learning,
author = {Kim, Taekyung and Kee, Robin Inho and Panagou, Dimitra},
title = {Learning to Adapt Control Barrier Functions Under Epistemic and Aleatoric Uncertainty},
booktitle = {arXiv preprint arXiv.2504.03038v6},
shorttitle = {OA-CBF},
year = {2026},
pages = {}
}
LaTeX
복사