.png&customEmojiId=39718d5c-31e3-80aa-b348-007a4b8940bb&width=250)
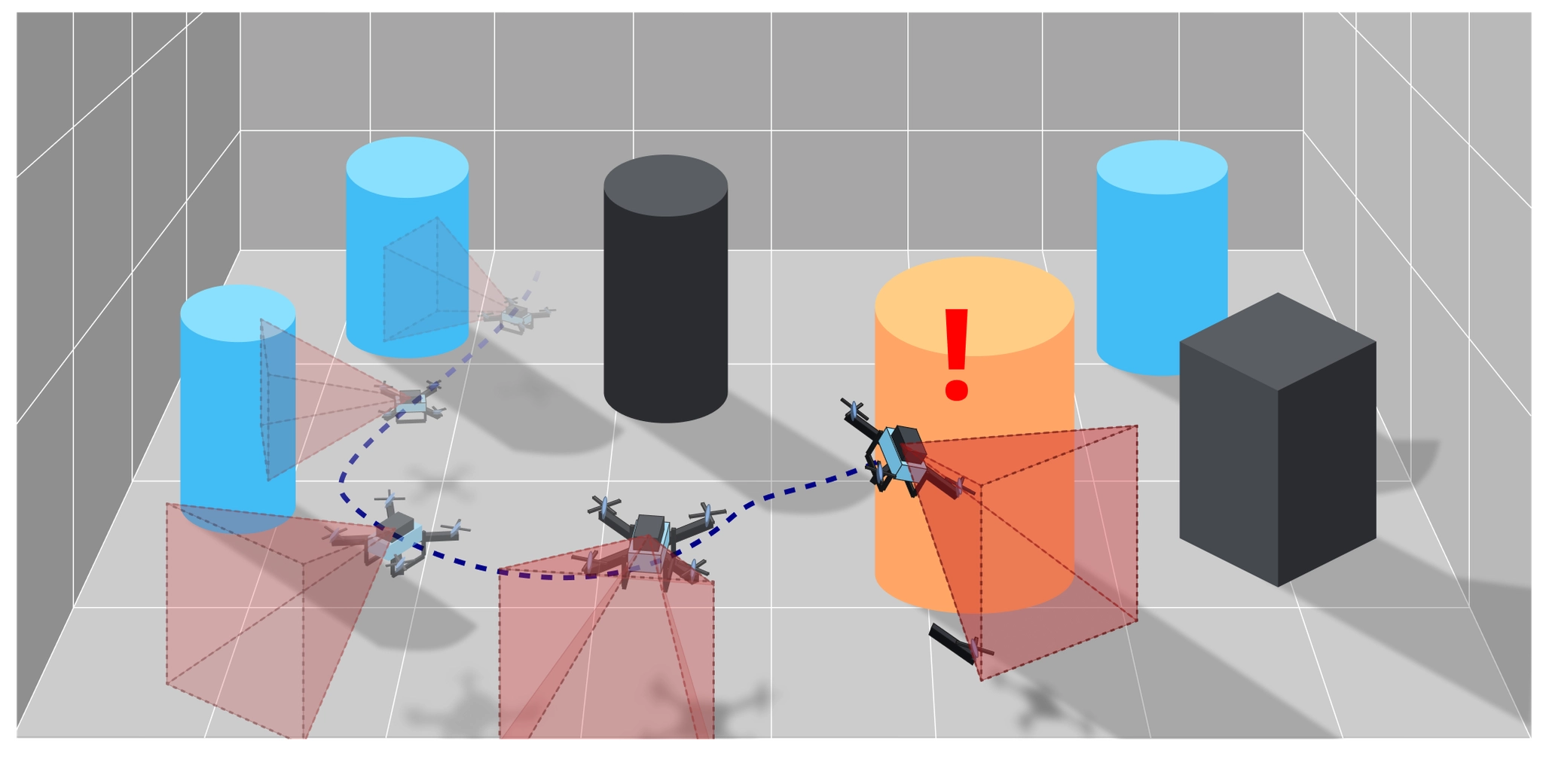
Visibility-Agnostic Baseline: The robot observes the initially unknown obstacle too late and collides.
SEAMLiS: The robot keeps the motion-relevant unknown boundary visible and safely avoids the obstacle.
Autonomous exploration is not only about where the robot moves, but also where it looks. With a finite-FoV sensor, a robot may move toward locally unknown space while its sensor is looking elsewhere, causing hidden obstacles to be detected too late.
SEAMLiS is a plug-in safety layer for decentralized multi-robot exploration. It keeps the upstream planner unchanged, but filters the robot’s yaw and acceleration commands so that hidden obstacles are observed early enough for the safety controller to react.


Motivation
Exploration stacks often select informative frontiers or viewpoints while a local controller avoids obstacles already in the map. With finite sensing range and limited field of view, this separation can be unsafe. For holonomic or quadrotor-like robots, yaw (sensor angle) can be decoupled from translation, so the robot may look toward information-rich regions while moving toward locally unknown space.
A hidden obstacle outside the current FoV may then be detected too late. Once it enters the local map, the remaining distance may be insufficient for collision avoidance under input constraints.
This becomes more critical in decentralized multi-robot exploration, where robots may exchange only poses and frontier information instead of full maps or obstacle lists. An obstacle detected by one robot is not necessarily available to another robot’s local safety controller, so safety must be enforced from each robot’s own local sensing and map.
Q: Is SEAMLiS a new exploration planner?
A: No. The goal is not to choose a better frontier or next-best view. The goal is to make an arbitrary upstream exploration stack safe when sensing is finite-range and FoV-limited, and when sensor heading is decoupled from translational motion.
Core Idea: Keep the Critical Unknown Boundary Visible
.png&blockId=39718d5c-31e3-80f6-805f-c4ff029a31bd)
Visibility-agnostic yaw vs SEAMLiS. A visibility-promoting yaw command can reveal new area while leaving the critical known-free/unknown boundary outside the FoV. SEAMLiS switches to velocity-tracking backup yaw when needed, keeping the visibility margin nonnegative while still allowing information-greedy yaw when certified safe.
SEAMLiS monitors the first point where the robot’s planned path leaves the currently known-free region. We call this the critical point. Beyond this point, the robot is relying on the optimistic assumption that unknown space is traversable.
The attitude filter checks whether the robot can keep using the nominal visibility-promoting yaw command while still being able to rotate the sensor toward the critical point with enough braking margin. If yes, SEAMLiS keeps the nominal yaw command. If not, it switches to a velocity-tracking backup yaw policy so the robot looks where it is moving.
This check is implemented with a gatekeeper-style monitor. The gatekeeper evaluates candidate yaw rollouts and allows information-greedy yaw only when the visibility margin remains safe. Once hidden obstacles are detected and added to the local map, the CBF-based positional filter handles collision avoidance with known obstacles, newly detected obstacles, and neighboring robots.
SEAMLiS: A Plug-In Safety Layer for Exploration
Safe Exploration for Autonomous Multi-Robot Systems Under Limited Sensing
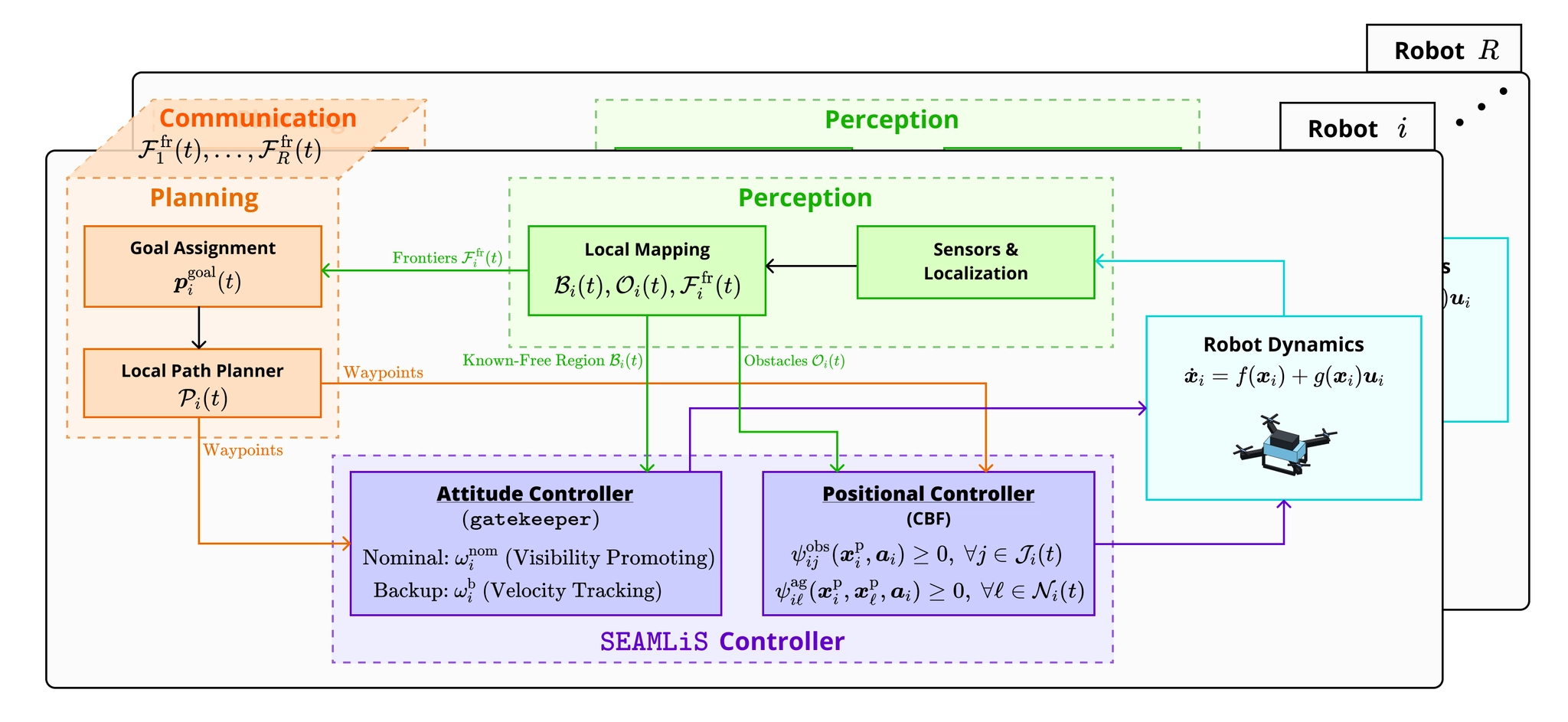
Framework overview. SEAMLiS leaves the upstream exploration stack unchanged, including goal assignment, local planning, and map updates. It is inserted at the execution layer, where the attitude gatekeeper filters yaw commands and the CBF-based positional filter modifies acceleration commands for safe execution.
SEAMLiS is designed to sit below the exploration planner rather than replace it. The upstream goal assignment and local path planner can be arbitrary: frontier-based, optimization-based, learning-based, decentralized, or asynchronous. Each robot can plan from its own local map and limited messages from nearby robots.
The safety layer is applied only at the controller level. The attitude gatekeeper decides whether to use information-greedy yaw or switch to velocity-tracking backup yaw, while the CBF-based positional filter handles collision avoidance after obstacles enter the local map. This separation makes SEAMLiS compatible with existing exploration pipelines while adding perception-aware safety under limited sensing.
Preview Experiments
We compare different yaw policies while keeping the same positional CBF safety controller. The videos show that sensing direction alone can decide whether the safety controller receives obstacle information early enough.
Using D-CoScan (2 Robots)
•
Constant Yaw-Rate
•
Visibility-Promoting Yaw
•
SEAMLiS
Using Frontier-Based Exploration (3 Robots)
•
Constant Yaw-Rate
•
Visibility-Promoting Yaw
•
SEAMLiS
More Test Cases: SEAMLiS
Frontier exploration, 1 robot
Frontier exploration, 2 robots
D-CoScan, 1 robot
D-CoScan, 3 robots
Isaac Sim Validation
We also test the same limited-sensing failure mode in Isaac Sim. The baselines reproduce late-detection collisions, while SEAMLiS safely completes the exploration task.
•
Constant Yaw-Rate
•
Visibility-Promoting Yaw
•
SEAMLiS
Hardware Experiments
The Crazyflie experiment shows the same behavior on hardware. With constant yaw-rate, one robot collides with an initially unknown obstacle. With SEAMLiS, the robot keeps the relevant unknown boundary visible and avoids the obstacle.
Constant Yaw-Rate Baseline
SEAMLiS (Ours)
BibTex
@inproceedings{kim2026seamlis,
author = {Kim, Taekyung and Kumar, Rahul H and Menon, Aswin D. and Lin, Tzu-Hsiang and Panagou, Dimitra},
title = {SEAMLiS: Visibility-Aware Safety for Perception-Limited Multi-Robot Exploration},
booktitle = {arXiv preprint},
shorttitle = {SEAMLiS},
year = {2026}
}
LaTeX
복사