

.png&blockId=26818d5c-31e3-8110-90d3-cebd17860fef)
Overview diagram of the Safe Model Predictive Diffusion (Safe MPD) algorithm. The forward process (top) gradually adds noise to an optimal trajectory. The backward (denoising) process (bottom) iteratively refines a random trajectory into an optimal solution. At each step, we generate K candidate trajectories. Our Shielded Rollout mechanism transforms every candidate into a kinodynamically feasible and provably safe trajectory before the Monte Carlo score ascent step.
We present Safe Model Predictive Diffusion (Safe MPD), a training-free diffusion planner for generating provably safe and kinodynamically feasible trajectories. Our algorithm integrates a safety shield directly into the denoising process of a model-based diffusion framework. By enforcing feasibility and safety on every sample throughout the denoising process, our method avoids the common pitfalls of post-processing corrections, such as computational intractability and loss of feasibility. Through a parallelization in GPU, our method achieves sub-second planning times even on challenging, non-convex problems.


Motivation
Diffusion-based planners are powerful but often lack safety guarantees. Common safety strategies like guidance or projection can lead to kinodynamically infeasible paths or be computationally intractable in complex, non-convex environments.

MBD: Denoising step

MBD: Final trajectory tracking
Applying Model-Based Diffusion (MBD) to robotics faces two major hurdles:
1.
Sampling Inefficiency: Trajectories that are both safe and kinodynamically feasible form a thin manifold of Lebesgue measure zero in the sampling distribution, making the sampling extremely inefficient.
2.
Lack of Safety Guarantees: Sampling-based methods and post-processing correction techniques like guidance do not provide formal safety guarantees.
Preview Experiments
Comparison
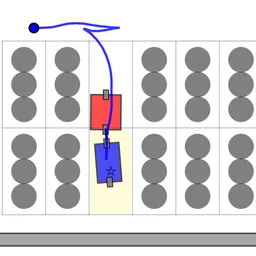
We consider acceleration-controlled tractor-trailer system for our experiments (more dynamical systems can be found in the paper).
•
MBD with Naive Penalty : Safety is violated (both collision and jackknifing).


•
MBD with Guidance: Safety is violated (both collision and jackknifing). Also, the final trajectory is kinodynamically infeasible.


•
MBD with Projection: It hits 1 hour time out. Because it needs to solve a non-convex optimization problem for N×K×T times. (N: diffusion steps; K: # of parallel samples; T: trajectory horizon)

(*For the projection method, the environment was simplified to contain only 6 circular obstacles near the goal position, whereas other methods were evaluated with 36 obstacles.)
•
Ours - Safe MPD: The final trajectory is both safe and kinodynamically feasible.


More Test Cases: Safe MPD
.gif&blockId=27618d5c-31e3-8099-ba33-fe30775afe2c)
.gif&blockId=27618d5c-31e3-8032-aa64-ed8343a9c6a5)

.gif&blockId=27618d5c-31e3-808b-9528-f9a780d227c9)
.gif&blockId=27618d5c-31e3-80d2-868d-ec05ab54eff4)

Benchmarking
We evaluated the performance with three dynamical models. For each model, we conducted 100 trials using random initial states.
Integration to Tractor-Trailer Navigation Stack

We integrated our Safe MPD planner into an existing tractor-trailer navigation framework and validated its performance in the high-fidelity vehicle simulator, CarMaker.
For more details on the experiments and implementation, please visit our GitHub repository.
Video
Acknowledgement
This research was performed while Taekyung Kim was an intern at the Toyota Research Institute of North America (TRINA), Toyota Motor North America.
BibTex
@inproceedings{kim2026safempd,
author = {Kim, Taekyung and Majd, Keyvan and Okamoto, Hideki and Hoxha, Bardh and Panagou, Dimitra and Fainekos, Georgios},
title = {Safe Model Predictive Diffusion with Shielding},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
shorttitle = {Safe MPD},
year = {2026}
}
LaTeX
복사