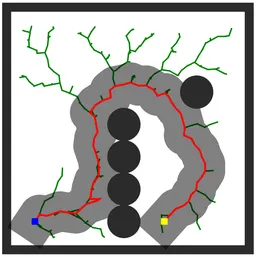

Main illustration of the Visibility-Aware RRT* algorithm.
The LQR-CBF-Steer function is used as a steering method in RRT* to generate safe trajectories between two nodes in the tree. Our Visibility-Aware RRT* algorithm incorporates two control barrier function (CBF) constraints into the LQR-CBF-Steer function to generate safe and efficient paths for robots with limited sensing capabilities. The collision avoidance CBF ensures the planned path remains collision-free w.r.t. known obstacles, while the novel visibility CBF guarantees the robot stays within locally collision-free regions, enabling timely detection and avoidance of unknown obstacles. These CBF constraints serve as termination criteria during the steering process, ensuring that the generated paths are both collision-free and visibility-aware.


Motivation
Collision with a hidden obstacle due to limited sensing capabilities and a perception-agnostic global planner.
Safe autonomous navigation in unknown environments is challenging for robots with limited sensing capabilities. The effectiveness of safety-critical control techniques, such as Control Barrier Functions (CBFs), relies on the assumption of complete environmental knowledge. The video demonstrates that a CBF-based safety-critical controller (CBF-QP) becomes infeasible and collides with a hidden obstacle while tracking a reference path generated by the standard LQR-RRT*, which is agnostic to the robot's sensing limitations. This illustrates that if the global planner does not account for the robot's limited perception, the theoretical safety guarantees may not hold for the entire navigation stack, leading to potentially hazardous situations. This highlights the need for a planning algorithm that explicitly considers the robot's limited sensing capabilities to ensure safe navigation in partially unknown environments.
Preview Experiments
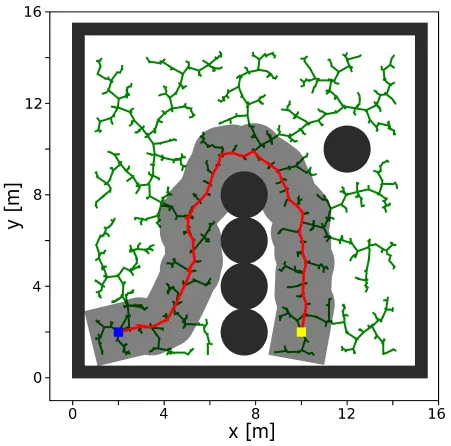
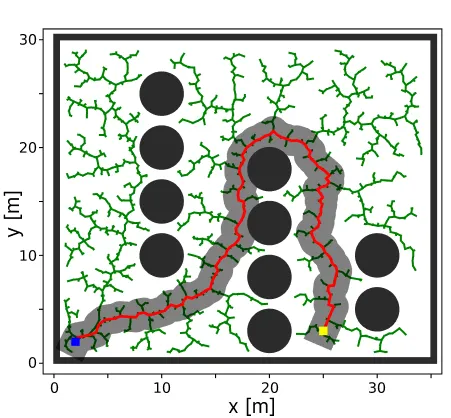
w/o visibility CBF
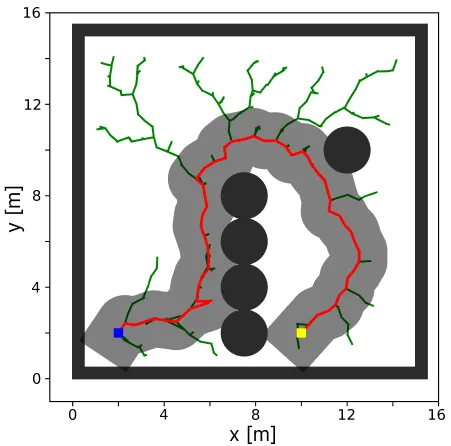
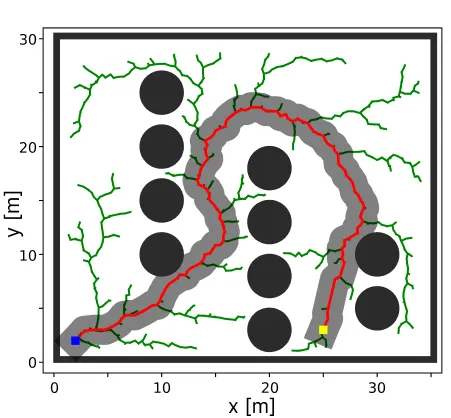
w/ visibility CBF
Visualization of the global planning results generated by the Visibility-Aware RRT*, without and with incorporating visibility CBF. The blue and yellow squares represent the start and goal positions. The black circles represent the known obstacles. The red line depict the final reference path. The shaded areas in gray represent the local collision-free set that the robot will sense while following the reference path.
CBF-QP tracking reference path generated w/o visibility CBF
CBF-QP tracking reference path generated w/ visibility CBF
Video of the CBF-QP experiments with a 45° FOV. The reference waypoints (green dots) correspond to the paths shown above. The blue shaded areas represent the actual local collision-free set collected from the onboard sensor. The orange circles are the hidden obstacles and the red dots indicate the detection points of these hidden obstacles. (left) The CBF-QP becomes infeasible when it detects the hidden obstacle, as the robot is already within an unsafe distance to perform collision avoidance. (right) Tracking the reference path from our method, the CBF-QP successfully avoids the hidden obstacle and reaches the goal.
w/o visibility CBF
w/ visibility CBF
Visualization of the global planning results in a larger environment.
Gatekeeper tracking reference path generated w/o visibility CBF
Gatekeeper tracking reference path generated w/ visibility CBF
Video of the Gatekeeper experiments with a 70° FOV. Gatekeeper is another line of safety-critical controllers that treats unmeasured space as an unsafe set and only controls the robot within the collision-free space sensed by the onboard sensor. If the nominal trajectory is deemed unsafe, Gatekeeper executes a backup controller, which, in this case, is a stop command, and subsequently performs global replanning.
The reference waypoints correspond to the paths shown above. Red shaded areas depict the subsequent nominal trajectories at the robot's position. (left) The Gatekeeper executes a stop command as the nominal trajectory is deemed unsafe, where the trajectory lies outside of the local collision-free set. Consequently, global replanning is required from the current position. (right) By tracking our reference path, the Gatekeeper successfully navigates to the goal without violating visibility constraint. This demonstrates that our method generates reference paths that are more efficient for navigation by minimizing the frequency of replanning required when used with controllers that treat unmeasured space as an unsafe set.
Acknowledgement
This work has been partially supported by Amazon Lab126. I also would like to thank Panagiotis Rousseas for valuable discussions on this work.
BibTex
@article{kim2025visibility-aware,
author = {Kim, Taekyung and Panagou, Dimitra},
title = {{Visibility-Aware RRT* for Safety-Critical Navigation of Perception-Limited Robots in Unknown Environments}},
journal = {IEEE Robotics and Automation Letters},
shorttitle = {{Visibility}-{RRT}*},
year = {2025},
volume = {10},
number = {5},
pages = {4508--4515},
doi = {10.48550/arXiv.2406.07728}
}
LaTeX
복사