.png&blockId=28bce604-fa48-4c8a-ae29-f39730bb63a0)

Our paper on Online CBF adaptation and its application to VTOL has been accepted to CDC 2025. We present a theoretical framework for online adaptation of CBF parameters under input constraints and propose a solution using uncertainty-aware neural network inference. It is a “theory” version of the ICRA 2025 paper ( [ICRA 2025] Online Adaptive ICCBF). It was a collaboration paper with Randy (BYU).
[ICRA 2025] Online Adaptive ICCBF). It was a collaboration paper with Randy (BYU).
[ICRA 2025] Online Adaptive ICCBF). It was a collaboration paper with Randy (BYU).

How to Adapt Control Barrier Functions? A Learning-Based Approach with Applications to a VTOL Quadplane
Authors: Taekyung Kim, Randal W. Beard, Dimitra Panagou

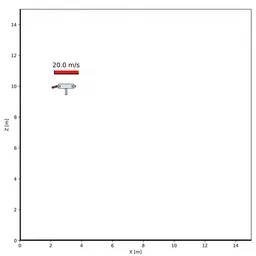
Abstract: In this paper, we present a novel theoretical framework for online adaptation of Control Barrier Function (CBF) parameters, i.e., of the class K functions included in the CBF condition, under input constraints. We introduce the concept of locally validated CBF parameters, which are adapted online to guarantee finite-horizon safety, based on conditions derived from Nagumo's theorem and tangent cone analysis. To identify these parameters online, we integrate a learning-based approach with an uncertainty-aware verification process that account for both epistemic and aleatoric uncertainties inherent in neural network predictions. Our method is demonstrated on a VTOL quadplane model during challenging transition and landing maneuvers, showcasing enhanced performance while maintaining safety.