.png&blockId=28bce604-fa48-4c8a-ae29-f39730bb63a0)
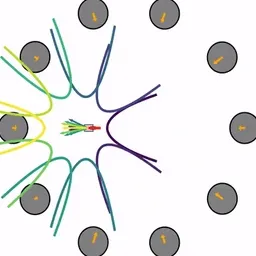
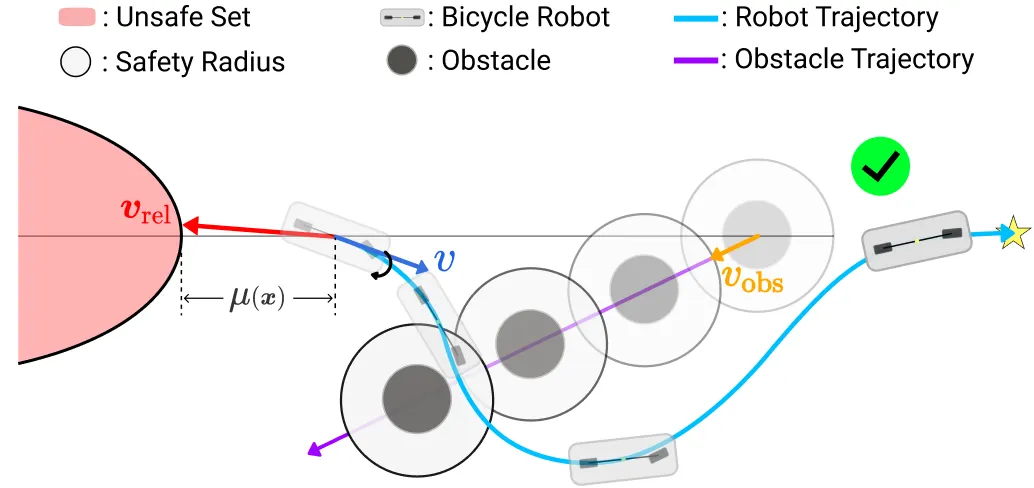
Our paper on dynamic obstacle collision avoidance using CBF has been accepted to ICRA 2026. We propose a Dynamic Parabolic Control Barrier Function (DPCBF) to address the fundamental infeasibility issues inherent in collision cone or velocity obstacle-based methods. By dynamically shaping the safety boundary, this approach significantly improves feasibility in dense environments where traditional methods often fail.
Beyond Collision Cones: Dynamic Obstacle Avoidance for Nonholonomic Robots via Dynamic Parabolic Control Barrier Functions
Authors: Hun Kuk Park*, Taekyung Kim*, Dimitra Panagou