.png&blockId=28bce604-fa48-4c8a-ae29-f39730bb63a0)
.png&blockId=2fa18d5c-31e3-804b-935b-c376740910a7&width=3600)
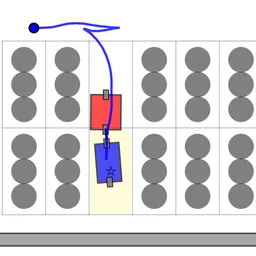
Our paper on Safe Model Predictive Diffusion (Safe MPD) has been accepted to ICRA 2026. We present a training-free framework that integrates a safety shield directly into the denoising process to generate provably safe and kinodynamically feasible trajectories. By enforcing constraints on every sample and leveraging GPU parallelization, our method achieves sub-second planning times even in challenging non-convex environments. This work was conducted during my summer internship at Toyota Research Institute North America (TRINA).
Safe Model Predictive Diffusion with Shielding
Authors: Taekyung Kim, Keyvan Majd, Hideki Okamoto, Bardh Hoxha, Dimitra Panagou, Georgios Fainekos