.png&blockId=28bce604-fa48-4c8a-ae29-f39730bb63a0)

Our paper on active exploration and uncertainty-aware deployment using neural network dynamics is accepted to RSS 2023. RSS is being held in Asia for the first time. I feel truly honored to have had the opportunity to present my work in Korea at one of the most prestigious robotics conferences prior to my relocation to the US.
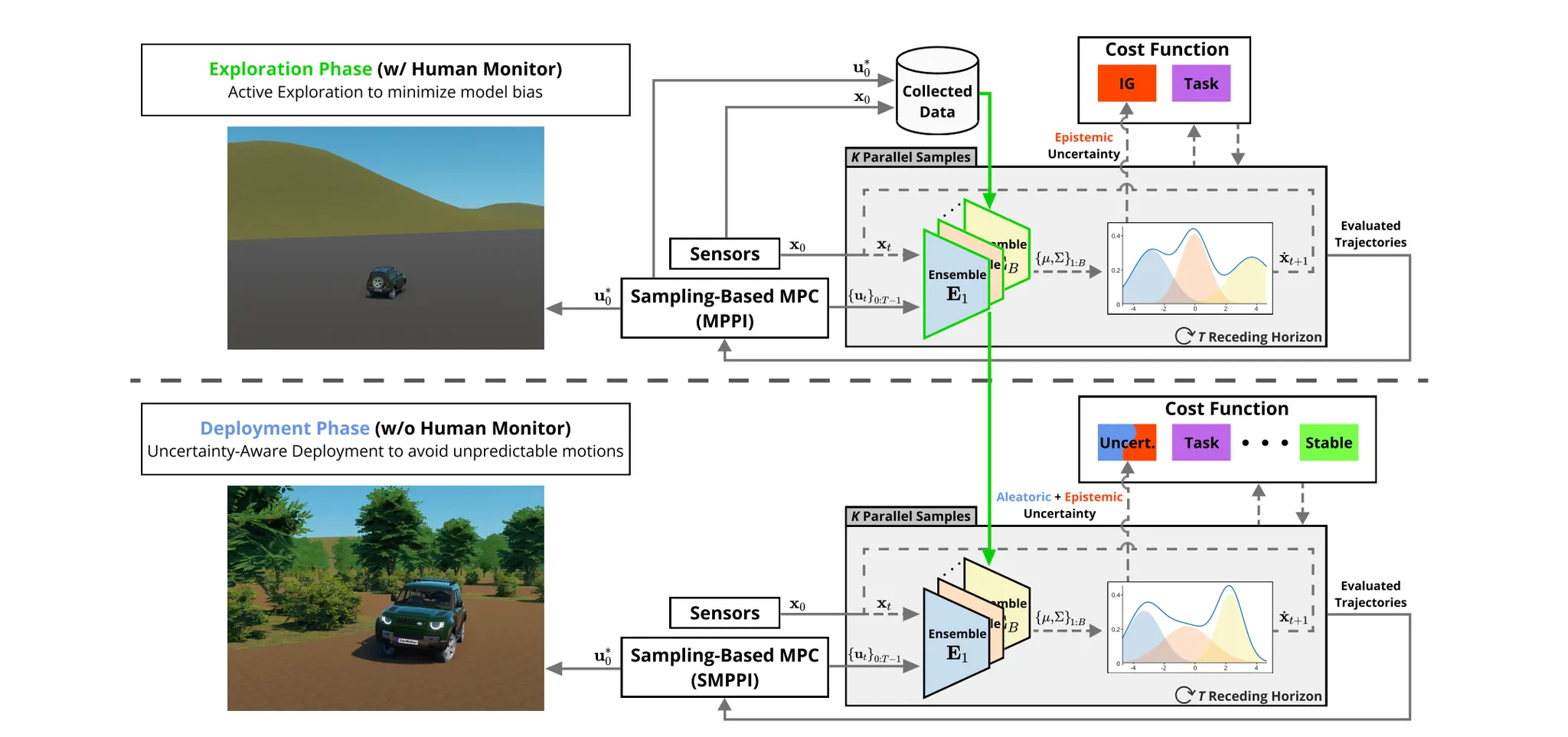
Bridging Active Exploration and Uncertainty-Aware Deployment Using Probabilistic Ensemble Neural Network Dynamics
Taekyung Kim*, Jungwi Mun*, Junwon Seo, Beomsu Kim, Seongil Hong
Abstract: In recent years, learning-based control in robotics has gained significant attention due to its capability to address complex tasks in real-world environments. With the advances in machine learning algorithms and computational capabilities, this approach is becoming increasingly important for solving challenging control problems in robotics by learning unknown or partially known robot dynamics. Active exploration, in which a robot directs itself to states that yield the highest information gain, is essential for efficient data collection and minimizing human supervision. Similarly, uncertainty-aware deployment has been a growing concern in robotic control, as uncertain actions informed by the learned model can lead to unstable motions or failure. However, active exploration and uncertainty-aware deployment have been studied independently, and there is limited literature that seamlessly integrates them. This paper presents a unified model-based reinforcement learning framework that bridges these two tasks in the robotics control domain. Our framework uses a probabilistic ensemble neural network for dynamics learning, allowing the quantification of epistemic uncertainty via Jensen-Rényi Divergence. The two opposing tasks of exploration and deployment are optimized through state-of-the-art sampling-based MPC, resulting in efficient collection of training data and successful avoidance of uncertain state-action spaces. We conduct experiments on both autonomous vehicles and wheeled robots, showing promising results for both exploration and deployment.