.png&blockId=28bce604-fa48-4c8a-ae29-f39730bb63a0)
.png&blockId=28bce604-fa48-4c8a-ae29-f39730bb63a0&width=256)
 About
About
I am a PhD student in Robotics at the University of Michigan, Ann Arbor, working with Prof. Dimitra Panagou. Currently, I am working closely with Toyota Research Institute North America (TRINA), collaborating with Georgios Fainekos and Bardh Hoxha.
My research interests lie in safety-critical planning/control, safe generative robot policy, learning for robot dynamics and control, and model-based reinforcement learning.
Prior to my PhD study, I was a robotics researcher at the AI Autonomy Technology Center of the Agency for Defense Development (ADD) in Korea. I fulfilled my mandatory military service for three years as a Research Officer for National Defense, jointly with the Republic of Korea Air Force.
I received my bachelor's degree (Summa Cum Laude) at the Daegu Gyeongbuk Institute of Science and Technology (DGIST). There, I worked with Prof. Yongseob Lim and Prof. Gyeungho Choi on computer vision and control algorithms for autonomous driving.


Besides, I am a professional SCUBA diver (Open Water SCUBA Instructor @ PADI) and enjoy exploring the underwater world. I love to play tennis and video games. I am also very interested in photography, wine, and traveling.



Live Web Demo
CBF Playground
.gif&blockId=37618d5c-31e3-8011-8b1e-dc46a39fecb2)
DPCBF - Satellite Debris Avoidance
Dynamic Parabolic CBF
VTOL Mode Transition + CBF
.gif&blockId=37c18d5c-31e3-8023-8369-f90c936cab66)


News

.png&customEmojiId=1f118d5c-31e3-8098-aa1d-007affc6950c&width=250)













Load more
Project Pages
Autonomous exploration is not only about where the robot moves, but also where it looks. With a finite-FoV sensor, a robot may move toward locally unknown space while its sensor is looking elsewhere, causing hidden obstacles to be detected too late.
SEAMLiS is a plug-in safety layer for decentralized multi-robot exploration. It keeps the upstream planner unchanged, but filters the robot’s yaw and acceleration commands so that hidden obstacles are observed early enough for the safety controller to react.
Motivation
.png&customEmojiId=39718d5c-31e3-80aa-b348-007a4b8940bb&width=250)
SEAMLiS: Safe Multi-Robot Exploration
.png&blockId=36518d5c-31e3-809b-9d46-ec8fbb3290a9)
Overview of OA-CBF. Offline, rollout data are used to train a probabilistic ensemble neural network that takes candidate CBF parameters as inputs and uses a graph-attention-based encoder to represent the robot, goal, and obstacle environment. During deployment, candidate CBF parameters are sampled, verified under epistemic and aleatoric uncertainty, and then selected according to predicted task progress before updating the CBF-based controller.
Control Barrier Functions provide a powerful way to enforce safety constraints in robotic systems, but their behavior depends strongly on the chosen class-K parameters. Under input constraints, these parameters are not merely performance tuning knobs: conservative choices can preserve feasibility but slow the robot down, while aggressive choices can make the safety filter infeasible or unsafe.
This work proposes Online Adaptive CBF (OA-CBF), a framework that adapts CBF parameters at runtime. Instead of directly predicting a single “best” parameter, OA-CBF evaluates queried candidate parameters. The method verifies whether each candidate is locally valid over a finite prediction horizon, rejects unreliable predictions using epistemic and aleatoric uncertainty estimates, and then applies the verified candidate with the best predicted progress.
Online Adaptive CBF
We revisit three backup-based safety filters—Backup CBF, Model Predictive Shielding (MPS), and gatekeeper—under a common safety-filter abstraction. All three methods share the same backbone: when the nominal controller becomes risky, they rely on a backup policy that keeps the system safe and steers it to a terminal controlled invariant set.
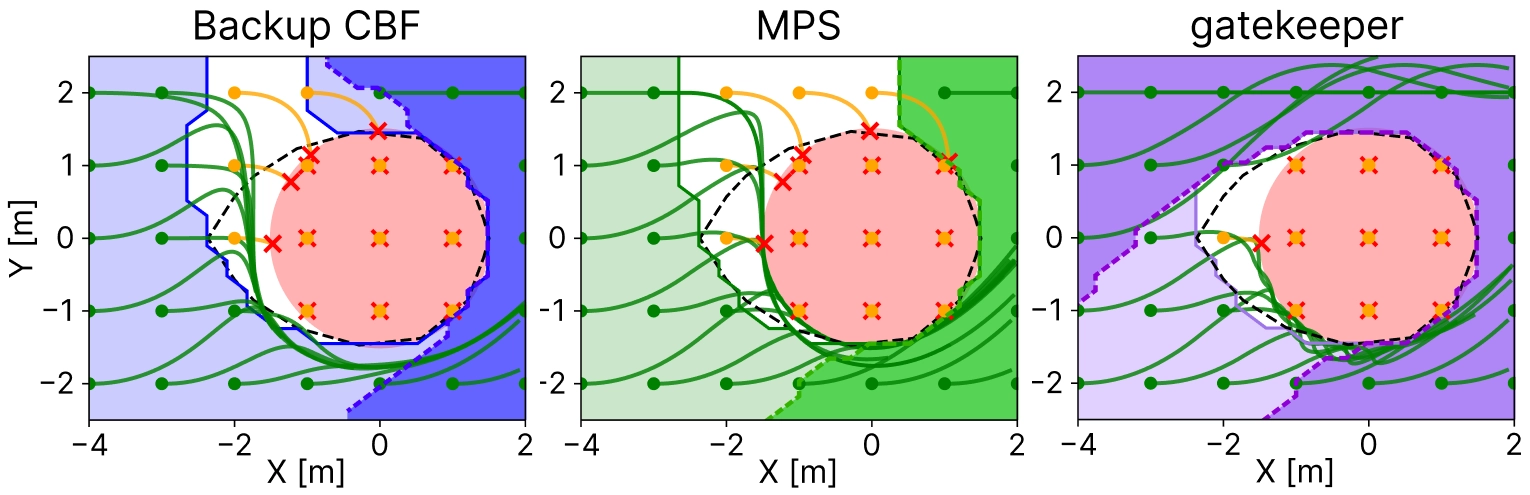
Recovered safe sets (light-colored regions) and filter-inactive sets (dark-colored regions) for the planar double-integrator example. The dashed black curve denotes the viability kernel. Backup CBF and MPS intervene earlier because safety is certified through an immediate or near-immediate commitment to backup, whereas gatekeeper enlarges the nominal-acceptance region by searching over the switching time.
This is a compact tutorial and comparative review paper. It clarifies the theoretical connections among Backup CBF, MPS, and gatekeeper, and explains when the three methods agree, differ, and intervene unnecessarily.
[CDC 2026] Review of Backup-Based Safety Filters
Can we bring parallelization into safety filters?
We present Policy Library Control Barrier Function (PL-CBF), a runtime safety filter for autonomous systems operating under evolving constraints and parameter-dependent dynamics. Unlike single-fallback safety filters, PL-CBF retains a finite library of candidate closed-loop policies and certifies safety whenever at least one library policy remains safe over the planning horizon. The method certifies safety on the fly; no offline value function computation. We validate PL-CBF on a planar double-integrator, highway driving with abrupt friction changes (8 states), and 3D quadrotor navigation in crowded dynamic environments (12 states), showing improved safety over single-policy safety filters while retaining millisecond-level runtime.
Motivation
Policy Library CBF
.png&blockId=26818d5c-31e3-8110-90d3-cebd17860fef)
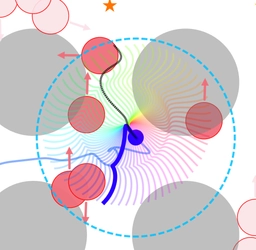
Overview diagram of the Safe Model Predictive Diffusion (Safe MPD) algorithm. The forward process (top) gradually adds noise to an optimal trajectory. The backward (denoising) process (bottom) iteratively refines a random trajectory into an optimal solution. At each step, we generate K candidate trajectories. Our Shielded Rollout mechanism transforms every candidate into a kinodynamically feasible and provably safe trajectory before the Monte Carlo score ascent step.
We present Safe Model Predictive Diffusion (Safe MPD), a training-free diffusion planner for generating provably safe and kinodynamically feasible trajectories. Our algorithm integrates a safety shield directly into the denoising process of a model-based diffusion framework. By enforcing feasibility and safety on every sample throughout the denoising process, our method avoids the common pitfalls of post-processing corrections, such as computational intractability and loss of feasibility. Through a parallelization in GPU, our method achieves sub-second planning times even on challenging, non-convex problems.
Motivation
[ICRA 2026] Safe Model Predictive Diffusion
.svg&blockId=27718d5c-31e3-80a8-8ef8-fff9b3306340)
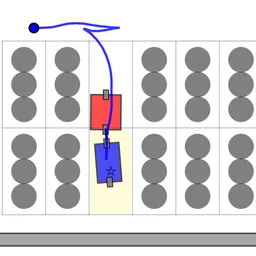
Illustration of the DPCBF mechanism in dynamic obstacle avoidance
We propose a Dynamic Parabolic Control Barrier Function (DPCBF) for nonholonomic robots in dynamic obstacle avoidance tasks. By dynamically shaping its safety boundary based on the distance to and relative velocity of an obstacle, our method provides a less conservative safety margin. Specifically, the parabola’s vertex shifts away from the robot’s origin in proportion to the relative distance, creating a more relaxed safety constraint compared to traditional collision-cone or velocity-obstacle approaches while still guaranteeing safety under input constraints. This less restrictive formulation significantly improves the feasibility of the underlying CBF-based quadratic program (QP), particularly in dense environments where other methods often fail.
Motivation
[ICRA 2026] Dynamic Parabolic CBF

Conceptual illustration of the inner safe set and locally validated CBF parameter.
We present a novel theoretical framework for online adaptation of Control Barrier Function (CBF) parameters, i.e., the class K functions, under input constraints. To this end, we propose the concept of locally validated CBF parameters, where adapting these parameters ensures that the system trajectories remain safe within the finite horizon. (a) A candidate inner safe set defined via an Input Constrained CBF cannot be rendered forward invariant using the given CBF parameter. (b) With locally validated CBF parameters, the trajectory remains within the inner safe set over the finite horizon, ensuring safety for that interval. By adapting the CBF parameters, the corresponding inner safe set is reshaped dynamically, alleviating conservatism by allowing the trajectory to extend beyond a fixed, globally verified inner safe set.
Motivation

[CDC 2025] How to Adapt CBFs?
.png&blockId=20d18d5c-31e3-80f7-a433-cf95527225b9)
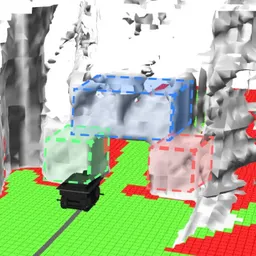
Baseline mapping (b) incorrectly labels obstacle voxels as free space due to odometry drift. Our certified map (c) deflates the reported safe region so that safety is preserved at every frame.
Accurate state estimation and mapping are prerequisites for safe navigation, yet most pipelines assume perfect pose estimates. Incremental drift in vision-based odometry (VIO/SLAM) can cause a map to misclassify obstacles as free space, leading to collisions.
We introduce a certifiably-correct mapping framework that deflates the claimed safe region at each timestep using the covariance of the incremental pose estimate. The deflation guarantees that the map stored in the robot’s body frame remains a subset of the true free space, even while global pose error grows unbounded.
Key points
•
Provably safe: the shrunken set is always a subset of the true free space.
•
Two plugins:
1.
Certified-SFC: deflates each face of a Safe Flight Corridor (SFC) polytope.
2.
Certified-ESDF: subtracts a voxel-wise safety margin from an ESDF.
[RSS 2025] Certifiably-Correct Mapping
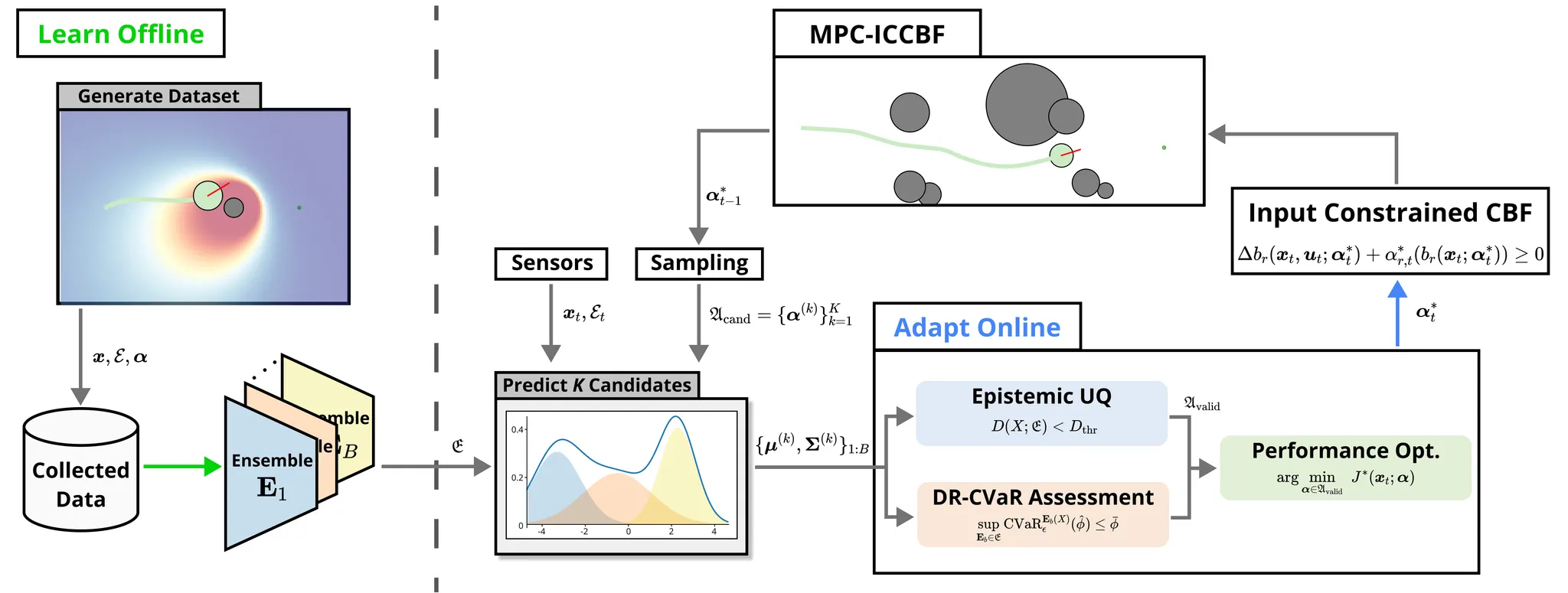
Overview diagram of the Online Adaptive ICCBF algorithm applied to MPC framework.
The Online Adaptive ICCBF algorithm dynamically adapts Input Constrained Control Barrier Function (ICCBF) parameters to optimize performance while ensuring safety for input-constrained nonlinear systems. Our approach leverages a Probabilistic Ensemble Neural Network (PENN) to predict performance and risk metrics, considering both epistemic and aleatoric uncertainties. The algorithm incorporates a two-step verification process using Jensen-Rényi Divergence (JRD) and Distributionally-Robust Conditional Value at Risk (DR-CVaR) to identify valid parameters. By adapting ICCBF parameters online based on the current state and nearby environment, our method optimizes performance while maintaining safety.
Motivation
[ICRA 2025] Online Adaptive ICCBF

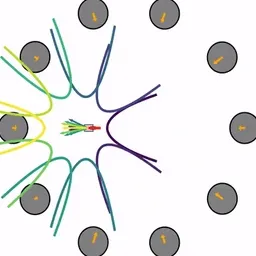
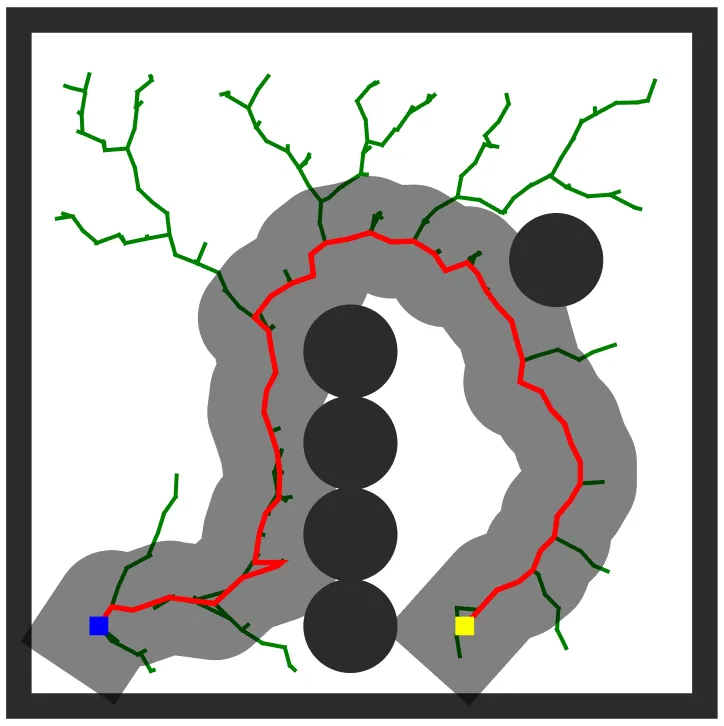
Main illustration of the Visibility-Aware RRT* algorithm.
The LQR-CBF-Steer function is used as a steering method in RRT* to generate safe trajectories between two nodes in the tree. Our Visibility-Aware RRT* algorithm incorporates two control barrier function (CBF) constraints into the LQR-CBF-Steer function to generate safe and efficient paths for robots with limited sensing capabilities. The collision avoidance CBF ensures the planned path remains collision-free w.r.t. known obstacles, while the novel visibility CBF guarantees the robot stays within locally collision-free regions, enabling timely detection and avoidance of unknown obstacles. These CBF constraints serve as termination criteria during the steering process, ensuring that the generated paths are both collision-free and visibility-aware.
Motivation
[RA-L 2025] Visibility-Aware RRT*
Load more
Projects
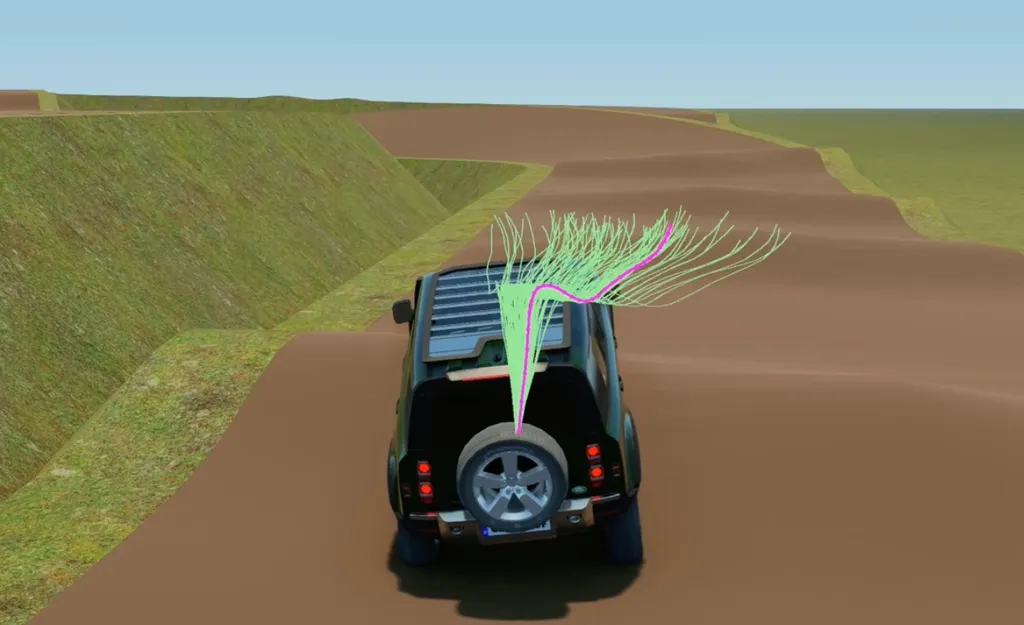

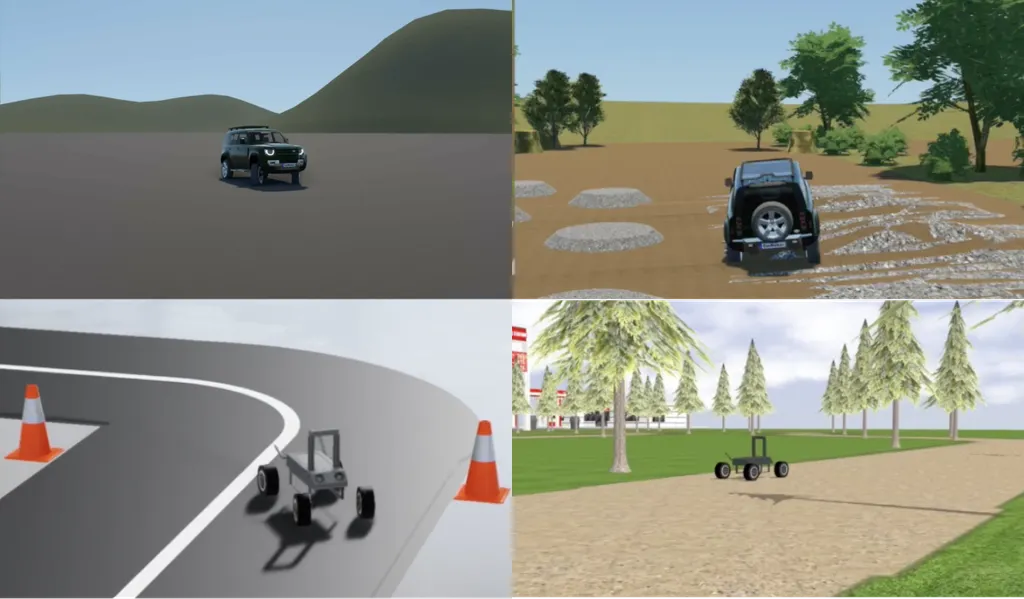
Off-Road Autonomous Driving

Uncertainty-Aware Active Exploration
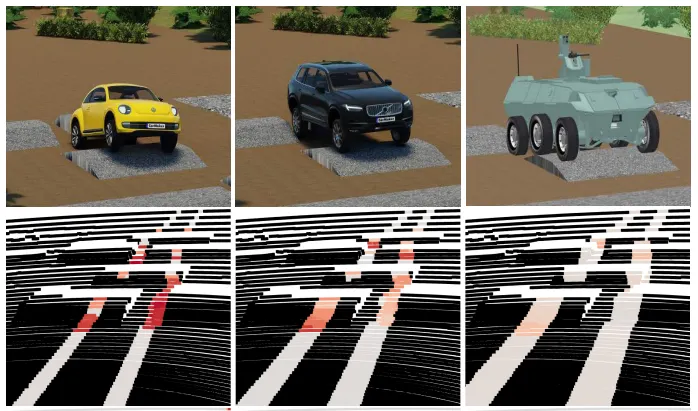

Traversability Estimation
Learning-Based Vehicle Model and Control

Smooth MPPI

DPoom
My laptop background image